アウディが自動運転技術の実現に向けた取り組みについて、「革新的なプロジェクト」を発表しています。その内容は、人工知能の技術を活用することによって、わずか1台のカメラからクルマの周囲の状況の3Dモデルを構築しようとするものです。
アウディの自動運転「Audi AIトラフィックジャムパイロット

アウディは自動運転技術の開発を精力的に進めている自動車メーカーですが、これまでの研究開発で、いわゆる「レベル3」の自動運転に相当するシステムを世界で初めて成功しています。
レベル3の自動運転とは、一定の条件のもとで完全な自動化を実現したレベルのことです。つまり、一定の条件が整えば人間の介入なく運転の全タスクをシステムが行います。
アウディが開発した最新のフラッグシップセダン「Audi A8」には「AIトラフィックジャムパイロット」と呼ばれるシステムが搭載されています。
このシステムは、高速道路などを走行中に交通渋滞が発生した際、具体的には60キロ以下の速度で走行している状況ではドライバーに代わって運転操作を引き受けることができます。
ドライバーはシステムが要求した場合には運転を引き受ける必要がありますが、常にクルマの動きを監視し続ける必要はないとのこと。
同一車線内であれば、発進から加速、ステアリングやブレーキ操作まですべてドライバーに代わってシステムが運転操作を行います。他のクルマが割り込んできたような状況であっても問題なく対応します。(Audi Japan Press Center)
単眼カメラで3D環境モデルを構築するAI技術
トラフィックジャムパイロットを公道でも利用するためには、各国の法に照らして安全性を検証していく必要がありますが、「条件付き自動運転」を可能にした生産車としては世界初のクルマです。
このような完全自動運転のシステムを実現するためには、クルマの周囲における環境を精密に分析してマッピングイメージを作り上げる必要があります。そのために、AIが絶対必要なテクノロジーになってきます。
今月4日から9日まで、米カリフォルニア州ロングビーチで「NIPS(神経情報処理システム)カンファレンス」が開催され、アウディの子会社「アウディ エレクトロニクス ベンチャー(AEV)」はAIを用いて精密な3D環境モデルを構築する単眼カメラについての研究報告を行います。
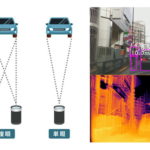
この技術では、クルマの前方に設けられたカメラが車両の前方約120度の範囲について、1.3メガピクセルの解像度の画像を1秒間に15枚撮影します。
撮影された画像はAIで分析することで、ほかのクルマや家、道路標識、通行人などを認識します。AIでは「セマンティックセグメンテーション」と呼ばれる画像処理が行われます。
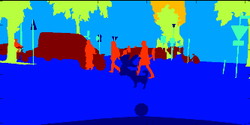
セマンティックセグメンテーションとは、画像中の各ピクセルについてどのようなカテゴリーのオブジェクトに属するかをラベリングしていく技術です。
図では道が青、人がオレンジ、車が赤で色分けされています。アウディのシステムでは、13種類のカテゴリーに分けて物体の認識をしていきます。
このシステムでは、画像中にある物体についての距離情報もまたAIで取得します。カメラから画像に含まれる物体までの距離を推定することを「深度推定」を呼びます。
深度推定とセマンティックセグメンテーションによる物体認識によって、車体の周囲にある環境の精緻な3Dモデルを構築します。
アウディでは、これらのAIを開発するために機械学習を用いていますが、とくに「教師なし学習」という学習方法を使ってニューラルネットワークをトレーニングしています。
今回開発されたシステムでは、学習用にステレオカメラで撮影された道路状況の大量な映像を用いました。その結果、わずか1台のカメラ(単眼カメラ)で撮影された画像から立体的な情報を生成するルールを独自に学習しました。
今回、アウディが開発したシステムで重要な点は、単眼カメラの映像から精緻な3Dモデルを生成できること、そして、教師なし学習によって独自のルールを見つけ出したことです。
単眼カメラによる深度推定については、日本のデータ分析企業「ALBELT」もまた技術開発を行い、GPUテクノロジーカンファレンスで出展する予定です。(ALBERTがAIを使ってカメラ映像から距離推定する技術を開発、自動運転などで応用)AIを活用したこれらの技術によって、完全自動運転システムの完成が間近に迫っています。