現在、世界各地で人工知能による自動運転技術の開発が進められていますが、実用化が難しいとされる技術のひとつが上手に「合流」する技術です。
人間の運転では、車両が合流する地点では他の車両の行動をそれぞれがお互いに察知して、いわゆる「あうんの呼吸」と「ゆあずり合い」の精神によってスムーズな交通が成立します。
この「ゆずり合い」による運転は自動運転技術にとって比較的困難な技術の一つとされているわけです。
そこでKDDI総合研究所と北海道大学が共同研究して、「ゆずり合うクルマ」を実現するAI技術を開発しました。
他車を配慮した運転は難しい
完全な自動運転車の普及は早ければ2020年ごろには始まるのではないかとされています。
しかしながら、自動運転技術にとって合流や追い越しなど複数の車両どうしによる協調が必要な運転は不得意であって、このような運転を人工知能でコントロールする技術の開発が注目されています。
そのため、他車の行動を配慮した制御を必要とするシーンにも対応できるような、人工知能の学習方式の確立が必要とされています。
運転行動のモジュール化で複雑な運転シーンにも対応
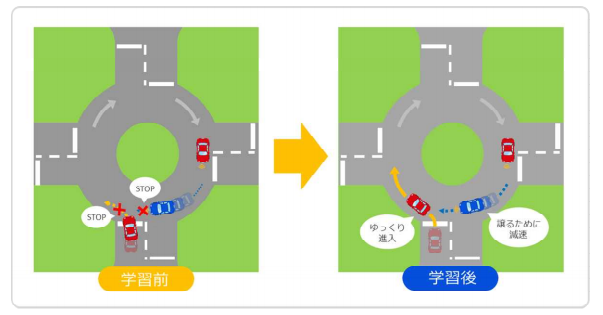
合流シーンでは、車両を減速して停止、そして周辺の状況を確認しながら発進、さらに合流先の車両への追随など、さまざまな要素によって安全な運転が実現されます。
ところが、これらの一連の要素をAIに学習させることは、これまでの技術だととても困難なことでした。
例えば、合流先の車両に追随する技術の改良を進めていくと減速や停止などの運転動作については逆に劣化してしまうという「過学習」と呼ばれる現象が発生してしまいます。
そのため、他車との連携が必要な複雑な運転行動についてはAIの学習が困難になってしまうわけです。
そこで、株式会社 KDDI 総合研究所は、運転シーンにおける行動を複数の要素に部品化(モジュール化)しました。
また、各モジュールごとの学習機能や、これらのモジュールをつなぎ合わせるAIについて、北海道大学大学院情報科学研究科の調和系工学研究室が開発しました。
研究グループは、開発した技術を約12分の1スケールのラジオコントロールカーに搭載。実際に合流時の運転を学習させたところ、このAIが有効であることも確認されました。
「ゆずり合い」が必要な運転シーンは合流のほかにも数多く存在します。今後は、例えば狭い道路におけるすれ違いや、直進優先の交差点での右折など、さまざまなシーンでも応用を目指していくとしています。