ホンダがいよいよ市街地でも使える自動運転技術の本格的な実現に向けて動き出しました。移動体の認識技術で定評のある香港のIT企業SenseTime社と長期にわたる共同研究開発の契約を締結しました。
SenseTimeとホンダのAI技術を融合へ
ホンダの研究開発を行う子会社である株式会社本田技術研究所が、人工知能の技術で強みをもつ香港の企業SenseTime Group Limitedと、5年間にわたる共同研究を開始すると発表しました。
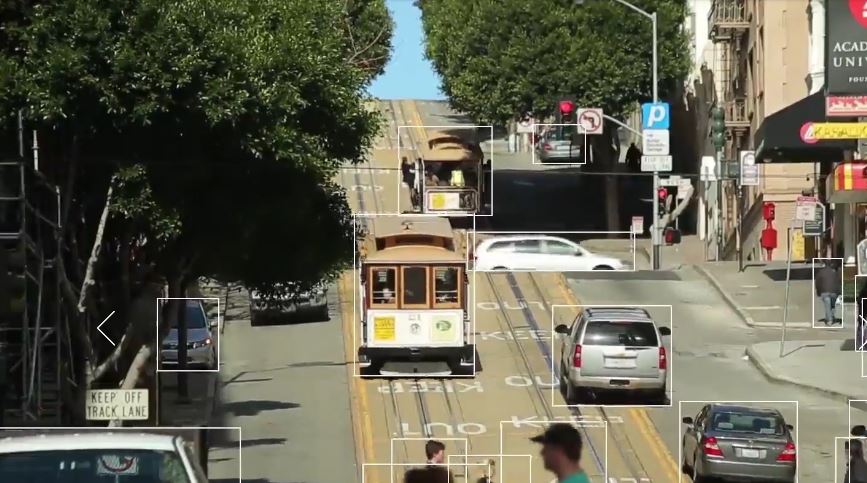
SenseTime社はディープラーニングを活用した画像認識の技術を得意とするIT企業で、スタンフォード大などが開催する画像認識技術の競技会「ImageNet」において、2015年と2016年に優勝しています。
共同開発では、自動運転の技術分野でホンダがもつ「シーン理解」「リスク予測」「行動計画」のAIアルゴリズムにSenseTime社がもつ「移動体認識技術」を合わせることで、市街地など複雑な交通状況でも走行が可能な自動運転技術を開発するとしています。
自動運転の技術ではアウディが新型のフラッグシップモデルAudi A8において、レベル3の自動運転を実現しています。しかし、この自動走行は条件付きであって、高速道路かつ60キロ以下の速度での走行といった制限があります。
ホンダが開発を目指しているのは、人や車の動きがより複雑である市街地での自動運転の実用化で、すなわち自動運転における次のステップである「レベル4」です。
自動運転システムを可能にするAIアルゴリズム
市街地での自動運転システムを達成するためにはいくつかのAIアルゴリズムが必要となってきます。
まず、走行中のクルマが置かれている環境そして歩行者やクルマの振る舞いや意図を推定する「シーン理解」が必要になります。
シーンを理解することができたなら、推定された歩行者や周囲のクルマの意図に基づいて将来の歩行者やクルマの位置を予測する「リスク予測」を行います。
そしてそのリスク予測に基づいて、停止や発進、回避など自車が行うべき公道を判断するとともに、その走行軌道を構築していきます。
これらの分析は人工知能を使ったアルゴリズムによって行いますが、そのためには周囲の状況を高精度で判断することが絶対必要になってきます。そこで、SenseTime社がもつ移動体認識の技術が非常に有用になります。
SenseTime社は画像をAIで分析して複数の歩行者やクルマの動きを判別する高度な技術をもちます。一方で、ホンダでは交差点や住宅街などの周囲の状況を認識する技術をもちます。
これらの技術を組み合わせることで、市街地でも自走が可能なレベル4の自動運転を実現しようと計画しています。
共同研究開発の領域として、これらAIアルゴリズムの設定のほか、これらを学習するための大規模計算技術、そしてAIプログラムを実際に車載コントローラーに実装するための技術も挙げています。
また、今後は自動運転のほかにもロボティクスの領域にも共同研究の領域を拡大していく予定とのこと。